引言
什么是图论?
图论是离散数学的一个十分有趣的分支,以 “图” 为主要研究对象,研究图的内在结构,探索其中的组合性质、代数性质和拓扑性质,找到满足条件的“好图”等。比如大名鼎鼎的七桥问题(欧拉回路)就属于图论的范畴
那么,图又是什么呢?
简单来说,图(Graph) 是由多个点以及连接这些点的线所构成的对象。具体定义详见维基百科·图、OI Wiki·图论相关概念

在计算机中,图也是一种相当重要的数据结构,最短路、最小生成树、网络流等问题往往需要图来实现
图的存储
本文约定用 $ n $ 代指图的点数,用 $ m $ 代指图的边数,用 $ d^+(u) $ 代指点 $ u $ 的出度,即以 $ u $ 为出发点的边数
邻接矩阵
方法
从图的概念我们知道,图由点集和边集组成。而我们可以用一个二维数组G来存边,G[u][v] = 1表示存在从u到v的边。如果边带权值w,可以令G[u][v] = w
#include <iostream>
#include <cstring>
using namespace std;
const int maxn = 1000;
int n, m;
bool vis[maxn];
int G[maxn][maxn];
// 查找边(u,v)是否存在
bool find_edge(int u, int v) { return G[u][v]; }
void dfs(int u) {
if (vis[u]) return;
vis[u] = true;
cout << u << ' ';
for (int v = 1; v <= n; v++)
if (G[u][v]) dfs(v);
}
int main() {
// 一共有n个点,m条边
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int u, v, w;
cin >> u >> v >> w;
G[u][v] = w;
}
cout << endl;
for (int i = 1; i <= n; i++) {
memset(vis, false, sizeof(vis));
dfs(i);
cout << '\n';
}
cout << endl;
cout << find_edge(3, 1) << endl;
cout << find_edge(4, 5) << endl;
return 0;
}
/* 输入示例:
5 6
1 2 1
2 3 2
1 3 3
3 1 10
3 4 3
5 2 7
*/
例题:P1359 租用游艇
利用邻接矩阵来存储图,注意在本题中邻接矩阵为半矩阵(类似于上三角矩阵,但主对角线元素为0, 即a[i][i] = 0)。需要注意的是,单纯dfs会超时,需要剪枝
动态规划也可以解,而且代码非常简洁(貌似本来是就动态规划的题,被我硬生生写成dfs😂)
复杂度
查询是否存在某条边:$ O(1) $
遍历一个点的所有出边:$ O(n) $
遍历整张图:$ O(n^2) $
空间复杂度:$ O(n^2) $
应用
邻接矩阵只适用于没有重边(或重边可以忽略)的情况
其最显著的优点是可以$ O(1) $查询一条边是否存在
由于邻接矩阵在稀疏图上效率很低(尤其是在点数较多的图上,空间无法承受),所以一般只会在稠密图上使用邻接矩阵
(以上关于复杂度和应用的资料来源于OI Wiki·图的存储,下同)
邻接表
方法
我们可以为各个点分别存储与它相关联的边,如:
1: -->a -->b -->c
2: -->b -->c
3: -->c -->d -->e
4: -->a -->d
可以看出邻接表是一种链表,它是以任意顺序来存储边的。但在算法竞赛中,我们可以用数组或vector来模拟链表
我们也可以存储边的终点,比如下图:
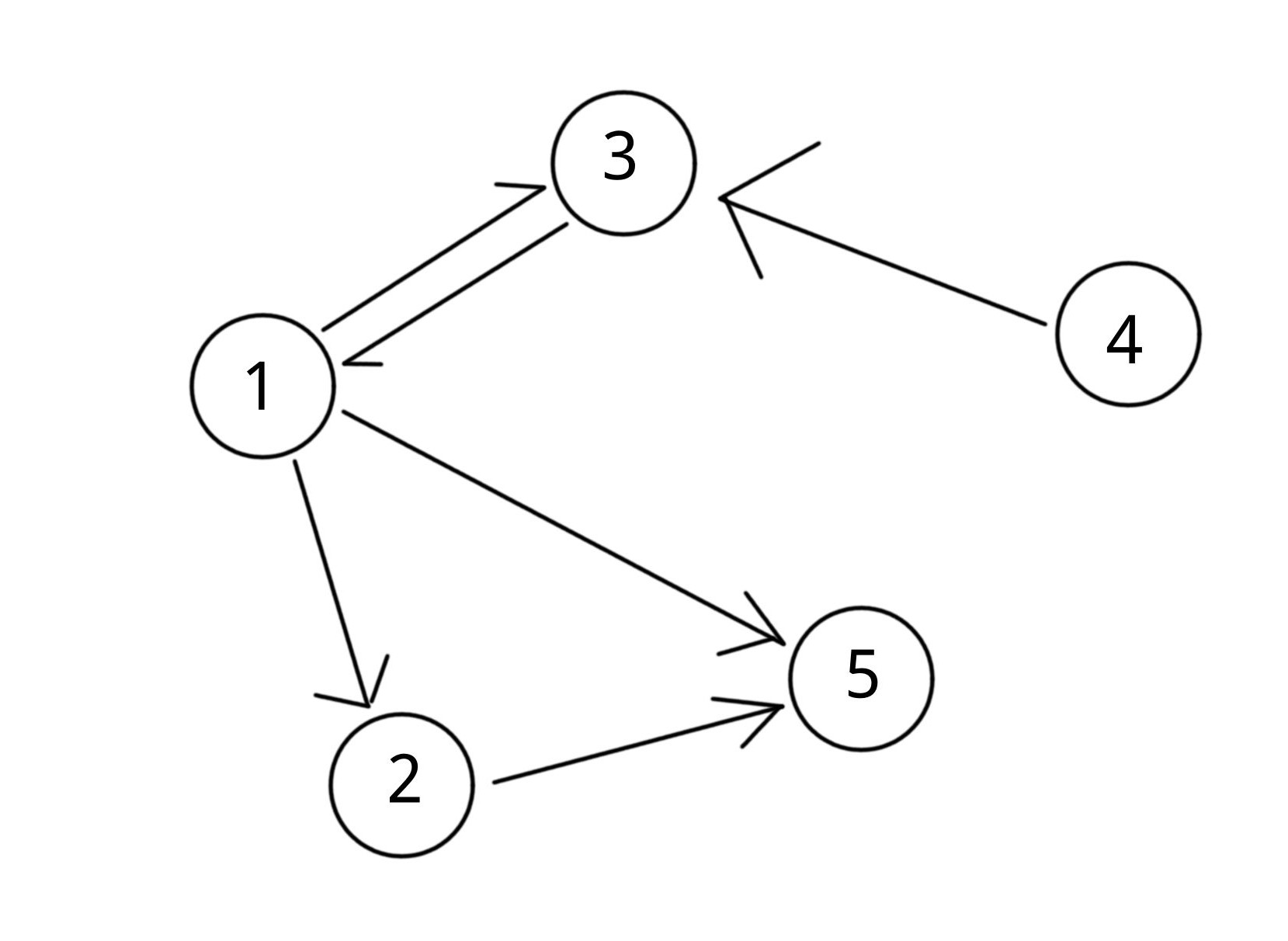
1: [2, 3, 5]
2: [5]
3: [1]
4: [3]
5: []
如果是无向边,只需两个端点都存一遍即可,比如无向边(1, 2):
1: [2]
2: [1]
下面是C++代码实现:
#include <iostream>
#include <vector>
using namespace std;
struct Node {
int v; // 边的终点
int w; // 边权
};
int n, m;
vector<int> vis;
vector<vector<Node> > G; // 存储点 u 的所有出边的相关信息(终点、边权等)
// 查找边(u,v)是否存在
bool find_edge(int u, int v) {
for (int i = 0; i < (int)G[u].size(); i++)
if (G[u][i].v == v) return true;
return false;
}
void dfs(int u) {
if (vis[u]) return;
vis[u] = 1;
cout << u << ' ';
for (int i = 0; i < (int)G[u].size(); i++) dfs(G[u][i].v);
}
int main() {
// 一共有n个点,m条边
cin >> n >> m;
vis.resize(n+1, false);
G.resize(n+1);
for (int i = 1; i <= m; i++) {
int u, v, w;
cin >> u >> v >> w;
G[u].push_back({v, w});
}
for (int i = 1; i <= n; i++) {
dfs(i);
cout << endl;
}
cout << find_edge(1, 2) << endl;
return 0;
}
复杂度
查询是否存在 u 到 v 的边:$ O(d^+(u)) $ (如果事先进行了排序就可以使用二分查找做到$ O(\log(d^+(u))) $ )
遍历点 u 的所有出边:$ O(d^+(u)) $
遍历整张图:$ O(n+m) $
空间复杂度:$ O(m) $
应用
存各种图都很适合,除非有特殊需求(如需要快速查询一条边是否存在,且点数较少,可以使用邻接矩阵)
尤其适用于需要对一个点的所有出边进行排序的场合
链式前向星
方法
邻接表的升级版,其实就是静态建立的邻接表
其特点是对边进行编号,第一条边编号为0
关键是理解一下变量:
- 边集数组:
e[i]存储第 i 条边的边权 ne,表示与这个边起点相同的上一条边的编号- 头结点数组:
h[i]表示以 i 为起点的最后一条边的编号
h数组一般初始化为-1,遍历图时ne = -1做为终止条件
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 1e5 + 10;
int n, m, idx;
int h[N], ne[N], to[N], e[N], vis[N];
// h[u]初始值为 -1
void add_edge(int u, int v, int w) {
to[idx] = v; // 终点
e[idx] = w; // 边权
ne[idx] = h[u]; // 以 u 为起点的上一条边的编号
h[u] = idx++; // 更新以 u 为起点上一条边的编号
}
void dfs(int u) {
cout << u << ' ';
vis[u] = true;
for (int i = h[u]; ~i; i = ne[i]) { // ~i 相当于 i != -1
if (!vis[to[i]]) dfs(to[i]);
}
}
void print() { // 遍历各点出边终点
for (int i = 1; i <= n; i++) {
cout << i << ": ";
for (int j = h[i]; ~j; j = ne[j])
cout << to[j] << ' ';
cout << "\n";
}
}
int main() {
memset(h, -1, sizeof(h)); // 初始化;ne[i] = -1表示到达终点
// 存图
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int u, v, w;
cin >> u >> v >> w;
add_edge(u, v, w);
// add_edge(v, u, w); // 无向边
// 输出存储过程
cout<<"to["<<idx-1<<"] = "<<to[idx-1]<<"; "
<<"ne["<<idx-1<<"] = "<<ne[idx-1]<<"; "
<<"h["<<u<<"] = "<<h[u]<<";\n";
}
print();
for (int i = 1; i <= n; i++) {
memset(vis, 0, sizeof(vis));
dfs(i);
}
// 输出存储结果
cout << "\n";
for (int i = 0; i <= n; i++) {
cout << "h[" << i << "] = " << h[i] << ", ";
cout << "ne[" << i << "] = " << ne[i] << ", ";
cout << "to[" << i << "] = " << to[i] << ", ";
cout << "e[" << i << "] = " << e[i] << ",\n";
}
return 0;
}
/* 输入示例:
4 3
1 2 5
2 4 10
4 3 15
*/
复杂度
查询是否存在 u 到 v 的边:$ O(d^+(u)) $
遍历点 u 的所有出边:$ O(d^+(u)) $
遍历整张图:$ O(n+m) $
空间复杂度:$ O(m) $
应用
存各种图都很适合,但不能快速查询一条边是否存在,也不能方便地对一个点的出边进行排序
优点是边是带编号的,有时会非常有用,而且如果idx的初始值为奇数,存双向边时i ^ 1即是i的反边(常用于网络流)
例题
这道题的技巧是反向存图,以便反向查找各点所能到达的编号最大的点,即:
cin >> u >> v >> w;
add_edge(v, u);
反向DFS得出结果:
for (int i = n; i > 0; i--)
if (!vis[i]) dfs(i, i);
最后输出vis[]即可
图论相关问题
拓扑排序
在图论中,由一个有向无环图的顶点组成的序列,当且仅当满足下列条件时,才能称为该图的一个拓扑排序(英语:Topological sorting):
- 序列中包含每个顶点,且每个顶点只出现一次;
- 若A在序列中排在B的前面,则在图中不存在从B到A的路径。
所谓拓扑排序,就是由一个偏序关系得到一个全序关系。通俗来讲,就是要按照一个特定次序来遍历图的所有序号:遍历一个结点前,需保证指向它的所有结点已经遍历。可以看出,只有有向无环图(DAG)才有拓扑序
我们可以构思出这样一个算法:
L = [] # 拓扑序
while 存在结点入度为1:
任选一个入度为1的结点u
L.append(u)
for v in G[u]:
v的度数 -= 1
从图中删除u结点
if len(L) == 初始图总结点数:
return True # 拓扑序存在
else:
return False
比如下图:

# 它的拓扑序可以是:
1 2 3 4 5
# 也可以是:
1 3 2 4 5
可以用BFS或DFS来实现拓扑排序。由于只需遍历一遍结点,复杂度相当客观,为$O(V+E)$
BFS
int n, m, _in[N]; // 点数,边数,入度
bool vis[N];
vector<vector<int>> G;
vector<int> topo;
bool toposort() {
queue<int> q;
for (int i = 1; i <= n; i++) {
if (!_in[i]) q.push(i);
}
while (!q.empty()) {
int u = q.front();
q.pop();
topo.emplace_back(u);
for (auto &v : G[u]) {
_in[v]--;
if (!_in[v]) q.push(v);
}
}
return (int)topo.size() == n;
}
DFS
void dfs(int i) {
if (!_in[i] && !vis[i] && !tmp[i]) {
topo.emplace_back(i);
vis[i] = true;
tmp[i] = true; // 临时标记。如果遍历到已标记结点,说明不是DAG
for (auto &j : G[i]) {
_in[j]--;
dfs(j);
}
tmp[i] = false;
}
}
bool toposort() {
for (int i = 1; i <= n; i++) dfs(i);
return ((int)topo.size() == n);
}
例题
题意:给出一棵无根树,每次操作删除所有叶子结点,问k次操作后还剩几个结点
类比拓扑排序,每次操作选出度数为1的结点,遍历其终边并使终点度数减1,然后删除这些结点。注意:题目给出的树是无向的,因此不能直接用DFS(比如树为一条单链,DFS会直接从一头遍历到另一头),而BFS会更好写,代码也是类似的,唯一的区别是,要判断删点前其邻接点度数为1的情况(说明邻接点已经在队列里了)
#include <bits/stdc++.h>
#define IOS ios::sync_with_stdio(false);cin.tie(0);cout.tie(0);
#define _all(x) (x).begin(), (x).end()
#define _abs(x) ((x >= 0) ? (x) : (-x))
#define PII pair<int, int>
#define PLL pair<LL, LL>
#define PDD pair<double, double>
#define fi first
#define se second
typedef long long LL;
typedef long double LD;
typedef unsigned long long ULL;
const int INF = 0x3f3f3f3f;
const double PI = acos(-1.0);
using namespace std;
const int N = 4e5 + 10;
int d[N], vis[N], n, k; // d[]为结点度数,vis[]为操作次数
vector<vector<int>> G;
void init() {
memset(d, 0, sizeof(d));
memset(vis, 0, sizeof(vis));
cin >> n >> k;
G.clear();
G.resize(n+1);
for (int i = 0; i < n-1; i++) {
int u, v;
cin >> u >> v;
G[u].emplace_back(v);
G[v].emplace_back(u);
d[u]++, d[v]++;
}
}
// 基于BFS的拓扑排序
void solve() {
queue<int> q;
for (int i = 1; i <= n; i++) {
if (d[i] == 1) {
q.push(i);
vis[i] = 1;
}
}
while (!q.empty()) {
int u = q.front();
q.pop();
for (auto &v : G[u]) {
// 邻接点度数为1,说明其已经在队列内
if (d[v] != 1) {
d[v]--;
// 删去点u后v度数为1,v入队
if (d[v] == 1) {
vis[v] = vis[u] + 1;
q.push(v);
}
}
}
}
int ans = 0;
for (int i = 1; i <= n; i++) {
if (vis[i] > k) ans++;
}
cout << ans << "\n";
}
int main() {
IOS
int test_case;
cin >> test_case;
while (test_case--) {
init();
solve();
}
return 0;
}
欧拉道路、欧拉回路
(待填坑……)
最小生成树
(待填坑……)
附录
参考文献
[1]维基百科·图论
[3]OI Wiki·图的存储
[4]宫崎修一《程序员的数学4:图论入门》